21CS637-Advanced-Networks
SDN Load Balancer
Multipath Topology (Image)
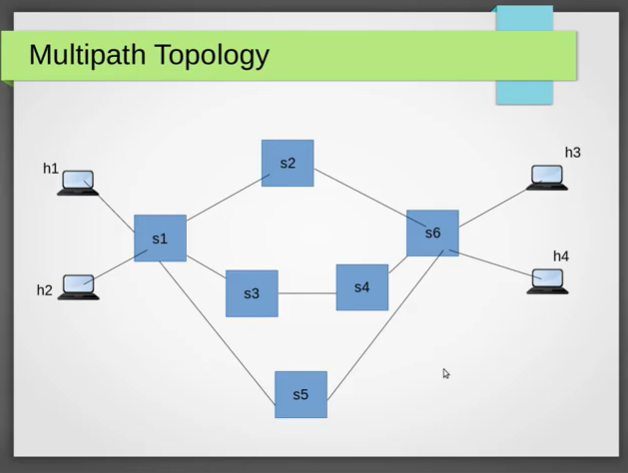
Mininet Topology (Code)
#!/usr/bin/python
# Author: Ramaguru Radhakrishnan
# Updated Date : Jan - 2022
# Network Topology as shown in the YouTube Video on/for Multipath Load Balancing
# Assignment : SDN - RYU Framework - Advanced Networks
from mininet.net import Mininet
from mininet.node import Controller, RemoteController
from mininet.cli import CLI
from mininet.log import setLogLevel, info
from mininet.topo import Topo
class loadBalancerTopo( Topo ):
def build( self ):
print "*** Adding Hosts"
h1 = self.addHost( 'h1' )
h2 = self.addHost( 'h2' )
h3 = self.addHost( 'h3' )
h4 = self.addHost( 'h4' )
print "*** Adding Switches"
s1 = self.addSwitch ( 's1' )
s2 = self.addSwitch ( 's2' )
s3 = self.addSwitch ( 's3' )
s4 = self.addSwitch ( 's4' )
s5 = self.addSwitch ( 's5' )
s6 = self.addSwitch ( 's6' )
print "*** Adding Links"
print "( h1, s1 ),"
self.addLink( h1, s1 )
print "( h2, s1 ),"
self.addLink( h2, s1 )
print "( h3, s6 ),"
self.addLink( h3, s6 )
print "( h4, s6 ),"
self.addLink( h4, s6 )
print "( s1, s2 ),"
self.addLink( s1, s2 )
print "( s1, s3 ),"
self.addLink( s1, s3 )
print "( s1, s5 ),"
self.addLink( s1, s5 )
print "( s2, s6 ),"
self.addLink( s2, s6 )
print "( s3, s4 ),"
self.addLink( s3, s4 )
print "( s4, s6 ),"
self.addLink( s4, s6 )
print "( s5, s6 )"
self.addLink( s5, s6 )
topos = { 'myNetTopology': ( lambda: loadBalancerTopo() ) }
RYU SDN Load Balancer [as shown in Video] (Code)
#!/usr/bin/python
# Author: Ramaguru Radhakrishnan
# Updated Date : Jan - 2022
# SDN-RYU Load Balancer
# Reference : Youtube Video as shown in Reference Section.
# Assignment : SDN - RYU Framework - Advanced Networks
from ryu import app
from ryu.base import app_manager
from ryu.controller import ofp_event
from ryu.controller.handler import CONFIG_DISPATCHER, MAIN_DISPATCHER
from ryu.controller.handler import set_ev_cls
from ryu.ofproto import ofproto_v1_3
from ryu.lib.packet import packet
from ryu.lib.packet import ethernet
from ryu.lib.packet import ether_types
from ryu.ofproto import ether
from ryu.lib.packet import ipv4
from ryu.lib.ovs import bridge
from ryu.lib.packet import in_proto
from ryu.lib.packet import icmp
from ryu.lib.packet import tcp
from ryu.lib.packet import udp
from ryu.lib import hub
import networkx as nx
from ryu.topology import event, switches
from ryu.topology.api import get_switch, get_link
INTERVAL = 10
DISCOVER_INTERVAL = 30
TOPOLOGY_DISCOVERED = 0
ALGO = 2 # [1: Random, 2: Shortest Path First, 3: Round Robin]
class loadBalancer(app_manager.RyuApp):
OFP_VERSIONS = [ofproto_v1_3.OFP_VERSION]
def __init__(self, *args, **kwargs):
super(loadBalancer, self).__init__(*args, **kwargs)
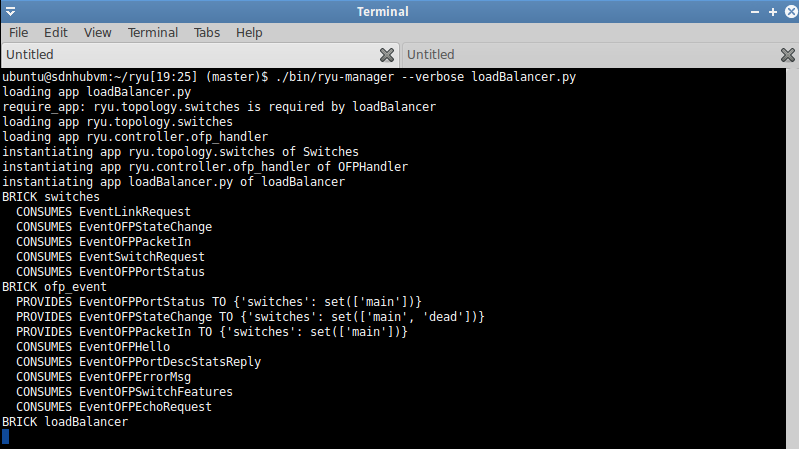
Demo
RYU SDN Load Balancer with Learning (Code)
#!/usr/bin/python
# Author: Ramaguru Radhakrishnan
# Updated Date : Jan - 2022
# SDN-RYU Load Balancer
# Reference : Youtube Video
# Assignment : SDN - RYU Framework - Advanced Networks
import logging
import struct
from ryu import app
from ryu.base import app_manager
from ryu.controller import ofp_event
from ryu.controller.handler import CONFIG_DISPATCHER, MAIN_DISPATCHER
from ryu.controller.handler import set_ev_cls
from ryu.ofproto import ofproto_v1_3
from ryu.lib.packet import packet
from ryu.lib.packet import ethernet
from ryu.lib.packet import ether_types
from ryu.ofproto import ether
from ryu.lib.packet import ipv4
from ryu.lib.ovs import bridge
from ryu.lib.packet import in_proto
from ryu.lib.packet import icmp
from ryu.lib.packet import tcp
from ryu.lib.packet import udp
from ryu.lib import hub
import networkx as nx
from ryu.topology import event, switches
from ryu.topology.api import get_switch, get_link
INTERVAL = 10
DISCOVER_INTERVAL = 30
TOPOLOGY_DISCOVERED = 0
ALGO = 2 # [1: Random, 2: Shortest Path First, 3: Round Robin]
class loadBalancer(app_manager.RyuApp):
OFP_VERSIONS = [ofproto_v1_3.OFP_VERSION]
def __init__(self, *args, **kwargs):
super(loadBalancer, self).__init__(*args, **kwargs)
self.mac_to_port = {}
def add_flow(self, datapath, port, dst, actions):
ofproto = datapath.ofproto
match = datapath.ofproto_parser.OFPMatch(in_port=port,
eth_dst=dst)
inst = [datapath.ofproto_parser.OFPInstructionActions(
ofproto.OFPIT_APPLY_ACTIONS, actions)]
mod = datapath.ofproto_parser.OFPFlowMod(
datapath=datapath, cookie=0, cookie_mask=0, table_id=0,
command=ofproto.OFPFC_ADD, idle_timeout=0, hard_timeout=0,
priority=0, buffer_id=ofproto.OFP_NO_BUFFER,
out_port=ofproto.OFPP_ANY,
out_group=ofproto.OFPG_ANY,
flags=0, match=match, instructions=inst)
datapath.send_msg(mod)
@set_ev_cls(ofp_event.EventOFPPacketIn, MAIN_DISPATCHER)
def _packet_in_handler(self, ev):
msg = ev.msg
datapath = msg.datapath
ofproto = datapath.ofproto
in_port = msg.match['in_port']
pkt = packet.Packet(msg.data)
eth = pkt.get_protocols(ethernet.ethernet)[0]
dst = eth.dst
src = eth.src
dpid = datapath.id
self.mac_to_port.setdefault(dpid, {})
self.logger.info("packet in %s %s %s %s", dpid, src, dst, in_port)
# learn a mac address to avoid FLOOD next time.
self.mac_to_port[dpid][src] = in_port
if dst in self.mac_to_port[dpid]:
out_port = self.mac_to_port[dpid][dst]
else:
out_port = ofproto.OFPP_FLOOD
actions = [datapath.ofproto_parser.OFPActionOutput(out_port)]
# install a flow to avoid packet_in next time
if out_port != ofproto.OFPP_FLOOD:
self.add_flow(datapath, in_port, dst, actions)
data = None
if msg.buffer_id == ofproto.OFP_NO_BUFFER:
data = msg.data
out = datapath.ofproto_parser.OFPPacketOut(
datapath=datapath, buffer_id=msg.buffer_id, in_port=in_port,
actions=actions, data=data)
datapath.send_msg(out)